| دانلود رایگان مقاله انگلیسی + خرید ترجمه فارسی | |
| عنوان فارسی مقاله: |
مقايسه كنترل كننده های مقاوم و پارامتری برای فعال سازهای ترکیبی فلز پلیمر یونی مدل سازی شده مرتبه کسری |
| عنوان انگلیسی مقاله: |
A comparison between robust and parameterized controllers for fractional order modeled Ionic Polymeric Metal Composite actuator |
|
|
|
| مشخصات مقاله انگلیسی (PDF) | |
| سال انتشار | 2013 |
| تعداد صفحات مقاله انگلیسی | 6 صفحه با فرمت pdf |
| رشته های مرتبط با این مقاله | مهندسی برق |
| گرایش های مرتبط با این مقاله | مهندسی الکترونیک و مهندسی کنترل |
| چاپ شده در مجله (ژورنال) | IFAC Proceedings Volumes |
| ارائه شده از دانشگاه | دانشگاه کاتانیا، دانشکده فنی، ایتالیا |
| نویسندگان | R. Caponetto, S. Graziani, F. Pappalardo and M. G. Xibillia |
| شناسه شاپا یا ISSN | ISSN 1474-6670 |
| شناسه دیجیتال – doi | https://doi.org/10.3182/20130204-3-FR-4032.00169 |
| رفرنس | دارد ✓ |
| کد محصول | 9551 |
| لینک مقاله در سایت مرجع | لینک این مقاله در نشریه Elsevier |
| نشریه الزویر |  |
| مشخصات و وضعیت ترجمه فارسی این مقاله (Word) | |
| وضعیت ترجمه | انجام شده و آماده دانلود |
| کیفیت ترجمه | طلایی⭐️ |
| تعداد صفحات ترجمه تایپ شده با فرمت ورد با قابلیت ویرایش | 15 صفحه با فونت 14 B Nazanin |
| ترجمه عناوین تصاویر و جداول | ترجمه شده است ✓ |
| ترجمه متون داخل تصاویر | ترجمه نشده است ☓ |
| ترجمه متون داخل جداول | ترجمه نشده است ☓ |
| درج تصاویر در فایل ترجمه | درج شده است ✓ |
| درج جداول در فایل ترجمه | درج شده است ✓ |
| درج فرمولها و محاسبات در فایل ترجمه | به صورت عکس درج شده است ✓ |
| فهرست مطالب |
|
چکیده 1- مقدمه 2. اکتساب داده ها و مدل سازی غشا 2-1 ساز و کار آزمایشی برای اکتساب داده ها 2-2 سیستم مرتبه کسری 2-3 مدل سازی غشا 3- کنترل پارامتری غشا 4- شکل گیری حلقه تک مقدار برای کنترل غشا 5- نکته های جمع بندی |
| بخشی از ترجمه |
|
چکیده در این مقاله یک تابع تبدیل مرتبه کسری، که از داده های آزمایشی شناسایی شده است، برای مدل سازی فعال ساز های IPMC مورد استفاده قرار گرفته است. مدل IPMC به عنوان تابعی از طول فعال ساز پارامتری سازی شده است. دو روش کنترل مختلف در این مقاله ارائه شده است و با هم مقایسه شده است ؛ مدل اول یک کنترل کننده پارامتری شده است که با برنامه دامنه فرکانسی کلاسیک طراحی شده است، در حالی که مورد دوم با استفاده از روش کنترل مقاوم طراحی شده است.
5. نکته های جمع بندی |
| بخشی از مقاله انگلیسی |
|
Abstract In this paper a fractional order transfer function, identified from experimental data, is used to model IPMC actuators. The IPMC model is parameterized as a function of the actuator length. Two different control approaches are proposed and compared; the first one is a parameterized controller designed with a classical frequency domain strategy, while the second is designed by using a robust control approach.
5- CONCLUDING REMARKS In the paper a non integer order model and two control strategies for IPMC actuators have been presented. The first controller, designed using a trial and error approach is scaled as a function of the device length. The design procedure is simple and the results, showed in figure 6, are encouraging. The resonance peaks are out from the desired band, 80HZ but still remain present. On the other end the robust control approach is more effective, see figure 7 even the controller realization could more difficult due to the order of the controller and to the values of its coefficients. Studies under development are planned in order to first reduce the robust controller order using model order reduction techniques and successively to implement and compare both controllers on an hardware in the loop system. The obtained controllers, at present Matalb routines, will be implemented comparing three digital approaches; the Grunwald-Letnikov one, the direct method based on mixed operator, and the continued-fractions delta-domain approach. Furthermore a new set of measurements, with variable sampling period, are going to be performed in order to model IPMC membranes produced with different fabrication parameters.
|
|
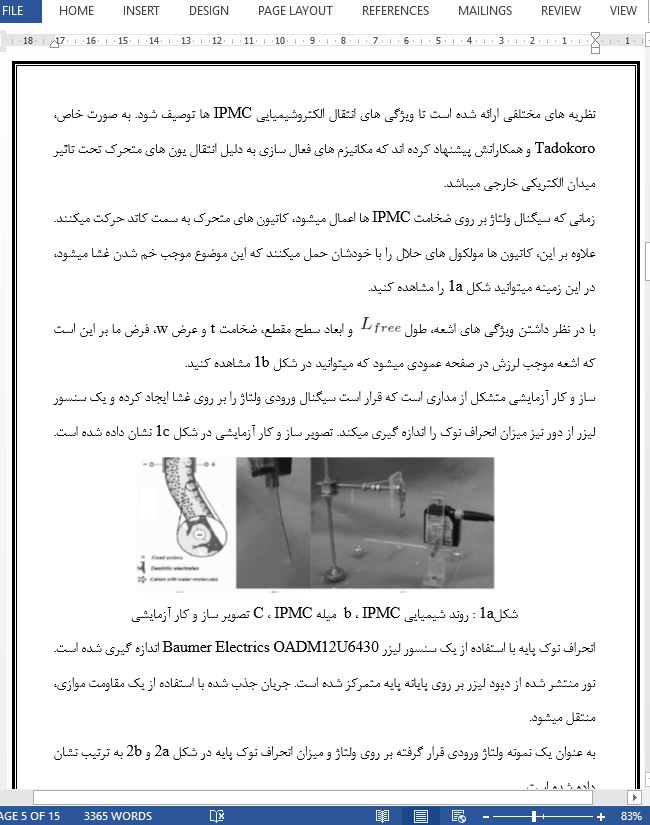
تصویری از مقاله ترجمه و تایپ شده در نرم افزار ورد |
|
|
| دانلود رایگان مقاله انگلیسی + خرید ترجمه فارسی | |
| عنوان فارسی مقاله: |
مقايسه كنترل كننده های مقاوم و پارامتری برای فعال سازهای ترکیبی فلز پلیمر یونی مدل سازی شده مرتبه کسری |
| عنوان انگلیسی مقاله: |
A comparison between robust and parameterized controllers for fractional order modeled Ionic Polymeric Metal Composite actuator |
|
|
|