| دانلود رایگان مقاله انگلیسی + خرید ترجمه فارسی
|
|
| عنوان فارسی مقاله: |
سیستم کنترلی تطبیقی بر اساس شبکه عصبی برای AUVs |
| عنوان انگلیسی مقاله: |
Neural-Network-Based Adaptive Control Systems for AUVs |
|
|
| مشخصات مقاله انگلیسی (PDF) | |
| سال انتشار | 1991 |
| تعداد صفحات مقاله انگلیسی | 10صفحه با فرمت pdf |
| رشته های مرتبط با این مقاله | مهندسی کامپیوتر |
| گرایش های مرتبط با این مقاله | هوش مصنوعی |
| مجله |
کاربرد مهندسی هوش مصنوعی – Engineering Applications of Artificial Intelligence |
| دانشگاه | دانشگاه توکیو |
| کلمات کلیدی | کنترل تطبیق پذیر، خود سازماندهی، کنترل یادگیری، کنترل حرکت هوشمند، انتشار رو به عقب خطا، شبکه-های عصبی، وسایل نقلیه زیر آبی، شبکه های عصبی چند لایه، یادگیری با نظارت و بدون نظارت، مقاومت، کنترل فازی |
| رفرنس | دارد ✓ |
| لینک مقاله در سایت مرجع | لینک این مقاله در نشریه Elsevier |
| نشریه | Elsevier |
| مشخصات و وضعیت ترجمه فارسی این مقاله (Word) | |
| تعداد صفحات ترجمه تایپ شده با فرمت ورد با قابلیت ویرایش و فونت 14 B Nazanin | 21صفحه |
| ترجمه عناوین تصاویر و جداول | ترجمه شده است ✓ |
| ترجمه متون داخل تصاویر | ترجمه نشده است ☓ |
| ترجمه متون داخل جداول | ترجمه نشده است ☓ |
| درج تصاویر در فایل ترجمه | درج شده است ✓ |
| درج جداول در فایل ترجمه | درج شده است ✓ |
| درج فرمولها و محاسبات در فایل ترجمه به صورت عکس | درج شده است ✓ |
| منابع داخل متن | درج نشده است ☓ |
- فهرست مطالب:
مقدمه
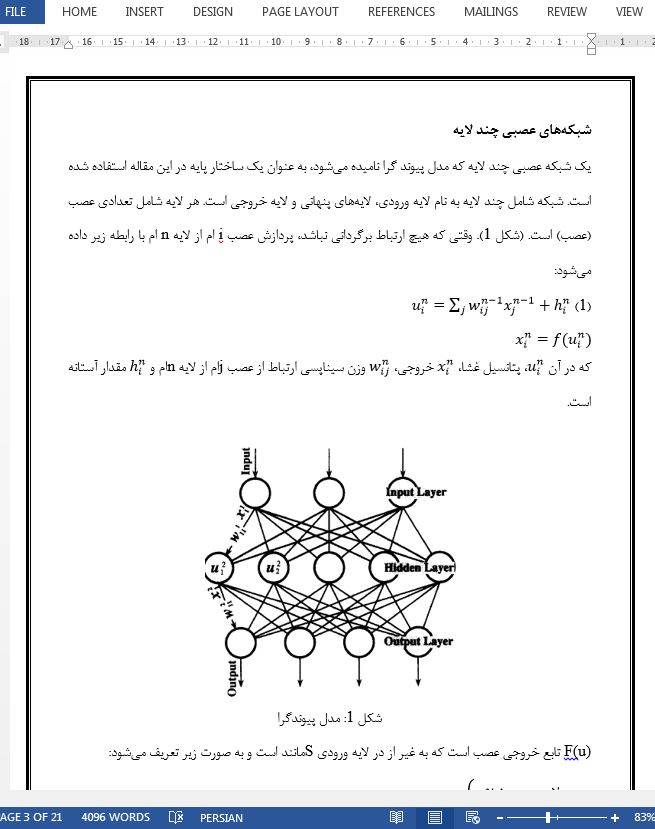
شبکه های عصبی چند لایه
سیستم یادگیری با نظارت
یادگیری با نظارت برای PTEROA60
یادگیری با نظارت برای PTEROA60
مقاومت در برابر مزاحمتها
سیستم یادگیری بدون نظارت
ارزیابی و تطبیق پذیری
فرایند سازماندهی کنترلر
SONCS برای بستر تست کوچک PW45
کنترل فازی اولیه
پیش از یادگیری کنترلر
مدل رو به جلو
ارزیابی و تخمین
نتیجه گیری
- بخشی از ترجمه:
نتیجه گیری
در این مقاله دو نوع سیستم کنترلی مبتنی بر شبکه های عصبی معرفی شد و در مورد کنترل حرکت طولی وسایل نقلیه تست PTEROA به کار رفت.
روش یادگیری با نظارت با یک کنترلر فازی به عنوان ناظر پیاده سازی می شود. نشان داده می شود که مزایای شبکه های عصبی، مانند انعطاف پذیری انتخاب I/O و ویژگیهای اشاغ، اعتدال کارهای کنترلی و پیشرفتی از مقاومت در مقابل مزاحمتها به دست می دهد.
برای کار با دینامیک ناشناخته شی کنترلی و تولید کنترلر مناسب، سیستم یادگیری بی نظارت که SONCS نامیده می شود معرفی شد. SONCS در مساله کنترل وسیله بدون افسار PW45 به کار رفت و در تولید یک کنترلر مناسب برای شنای افقی در یک عمق مطلوب موفق شد. گر چه تعداد زیادی از تکرارها برای پیش از یادگیری و مدلسازی رو به جلو لازم است، نشان داده می شود که تطبیق سریعا به سمت هدف مورد نظر پیش می رود.
شبکه عصبی یک ابزار جذاب برای تشخیص یک سیستم کنترلی است که باید هم خودکار باشد هم بتواند با نامشخص بودن دنیای واقعی کار کند. SONCS یک فهم از سیستم کنترلی تطبیق پذیر مبتنی بر شبکههای عصبی است. امید است که قدم اول برای پایه گذاری یک سیستم کنترلی برای وسایل زیر آب باشد که شامل هوش با مهارت می شود.
- بخشی از مقاله انگلیسی:
CONCLUDING REMARKS
In this paper two types of neural-network-based control systems are introduced and applied to the longitudinal motion control of the test-bed vehicles of PTEROA, The supervised learning approach is implemented along with a fuzzy controller as a supervisor. It is shown that the advantages of the neural networks, such as flexibility of the I/O selection and saturating characteristics, yield moderation of the control actions and an improvement of the robustness against disturbances. In order to deal with unknown dynamics of the controlled object and generate an appropriate controller, the unsupervised learning system, which is called “SONCS”, is introduced. The SONCS is applied to the control problem of the untethered test-bed vehicle PW45 and has succeeded in generating an appropriate controller for horizontal swimming at a desired depth. Though a large number of iterations are necessary for the pre-learning and the forward modelling, it is shown that the adaptation proceeds quickly to the goal. A neural network is an attractive tool for realization of a control system which is required to be both autonomous and able to deal with uncertainty of the real world. The SONCS is one realization of the neuralnetwork-based adaptive control system. It is hoped that this is the first step to the establishment of an ideal control system for underwater vehicles, which includes skilled intelligence.
|
تصویری از مقاله ترجمه و تایپ شده در نرم افزار ورد |
|
|
| دانلود رایگان مقاله انگلیسی + خرید ترجمه فارسی
|
|
| عنوان فارسی مقاله: |
سیستم کنترلی تطبیقی بر اساس شبکه عصبی برای AUVs |
| عنوان انگلیسی مقاله: |
Neural-Network-Based Adaptive Control Systems for AUVs |
|
|