| دانلود رایگان مقاله انگلیسی + خرید ترجمه فارسی
|
|
| عنوان فارسی مقاله: |
طراحی کنترل کننده PID مرتبه کسری برای سیستم ولتاژ رگولاتور اتوماتیک بر اساس بهینه سازی نهایی چند هدفه |
| عنوان انگلیسی مقاله: |
Design of fractional order PID controller for automatic regulator voltage system based on multi-objective extremal optimization |
|
|
| مشخصات مقاله انگلیسی (PDF) | |
| سال انتشار | 2015 |
| تعداد صفحات مقاله انگلیسی | 22 صفحه با فرمت pdf |
| رشته های مرتبط با این مقاله | مهندسی برق |
| گرایش های مرتبط با این مقاله | مهندسی کنترل، مهندسی الکترونیک و مکاترونیک |
| مجله | محاسبات عصبی – Neurocomputing |
| دانشگاه | گروه مهندسی برق و الکترونیک، دانشگاه Wenzhou، چین |
| کلمات کلیدی | بهینهسازی اکسترمال، بهینهسازی چندهدفه ، کنترلکننده PID مرتبه کسری، سیستم کنترل خودکار ولتاژ |
| رفرنس | دارد ✓ |
| لینک مقاله در سایت مرجع | لینک این مقاله در نشریه Elsevier |
| نشریه الزویر |  |
| مشخصات و وضعیت ترجمه فارسی این مقاله (Word) | |
| تعداد صفحات ترجمه تایپ شده با فرمت ورد با قابلیت ویرایش و فونت 14 B Nazanin | 28صفحه |
| ترجمه عناوین تصاویر و جداول | ترجمه شده است ✓ |
| ترجمه متون داخل تصاویر | ترجمه شده است ✓ |
| ترجمه متون داخل جداول | ترجمه شده است ✓ |
| درج تصاویر در فایل ترجمه | درج شده است ✓ |
| درج جداول در فایل ترجمه | درج شده است ✓ |
| درج فرمولها و محاسبات در فایل ترجمه به صورت عکس | درج شده است ✓ |
| منابع داخل متن | به صورت عدد درج شده است ✓ |
- فهرست مطالب:
چکیده
1. مقدمه
2. مقدمات
2-1. کنترلکننده PID مرتبه کسری
2-2. سیستم AVR
2-3. مسائل بهینهسازی چندهدفه
2-4. بهینهسازی اکسترمال
3. الگوریتم پیشنهادی
3-1. تعریف توابع چندهدفه
3-2. الگوریتم اصلی
الگوریتم طراحی کنترلکننده MOEO-FOPID
3-3. راهبرد تخصیص تناسب مبتنی بر پارتو
3-4. بهروزرسانی آرشیو خارجی نخبهگرا
3-5. تحلیل الگوریتم پیشنهادی
4. نتایج تجربی
4-1. MOEO-FOPID و مقایسه عملکرد آن با دیگر الگوریتمهای تکاملی استفادهشده برای طراحی FOPID
4-2. MOEO-PID و مقایسه عملکرد آن با MOEO-FOPID، NSGA-II-FOPID و NSGA-II-PID
4-3. آزمون پایداری(استواری)
4-3-1. عدم قطعیت ژنراتور
4-3-2. عدم قطعیت محرک
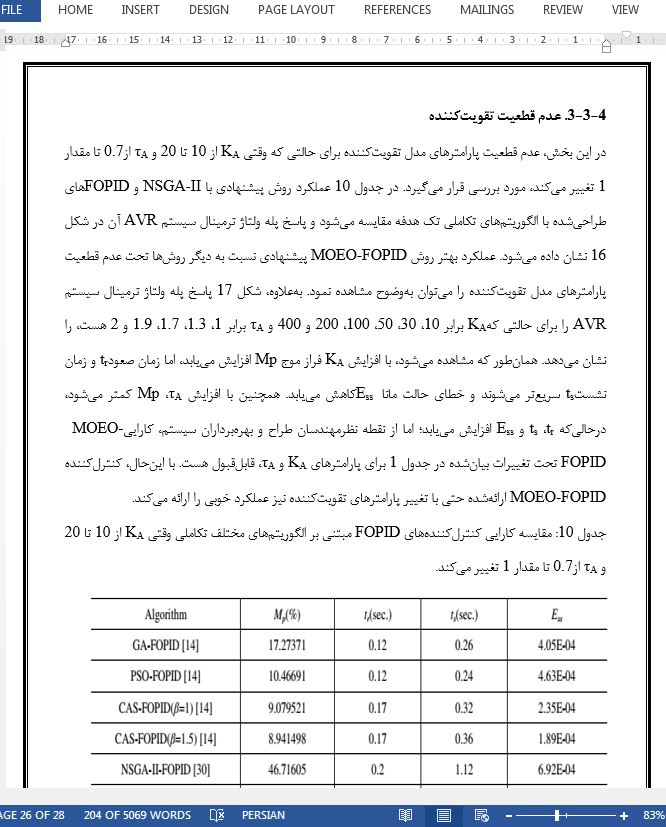
4-3-3. عدم قطعیت تقویتکننده
5. نتیجه گیری
- بخشی از ترجمه:
- نتیجه گیری
از نقطه نظر بهینهسازی چندهدفه، در این کار یک روش برای طراحی کنترلکننده FOPID مبتنی بر بهینهسازی چند معیاره اکسترمال (MOEO) که MEOE-FOPID نامیده میشود، برای سیستم AVR پیشنهاد شد. در ابتدا، مسئله طراحی FOPID برای سیستم AVR بهصورت مسئله بهینهسازی با سه تابع هدف شامل انتگرال قدر مطلق خطا (IAE)، قدر مطلق خطای حالت ماندگارو زمان نشست فرموله شد، سپس این مسئله با توسعه الگوریتم MOEO بهبودیافته بر پایه مکانیسم بهینهسازی تکراری مبتنی بر جمعیت تکی و جهش چندجملهای حل شد. یکی از مزایای جذاب روش پیشنهادی سادگی نسبی روش نسبت به روشهای NSGA-II-FOPID، NSGA-II-PID، GA-FOPID، PSO-FOPID و CAS-FOPID به دلیل پارامترهای تنظیمی کمتر و مکانیسم بهینهسازی تکراری مبتنی بر جمعیت تکی با تنها اپراتور تشخیص هست. بهعلاوه، نتایج تجربی نشان میدهد که الگوریتم MOEO-FOPID پیشنهادی ازلحاظ دقت و نیرومندی عملکرد بهتری نسبت به دیگر الگوریتمها فراهم میکند؛ بنابراین، MOEO-FOPID پیشنهادی را میتوان بهعنوان روش قابلاعتماد برای طراحی کنترلکنندههای FOPID برای سیستم AVR و دیگر سیستمهای صنعتی در نظر گرفت. بههرحال کارآمدی MOEO-FOPID ممکن است با تنظیم پارامترهای قابل تنظیم براساس مکانیسم وفقی و تعریف توابع چند معیاره مناسب بهبود یابد. از طرف دیگر، استفاده از MOEO-FOPID برای بیشتر سیستم کنترلی صنعتی پیچیده میتواند موضوع مهم دیگری برای تحقیقات آینده باشد.
- بخشی از مقاله انگلیسی:
5. Conclusion
From the perspective of multi-objective optimization, a novel FOPID controller design method called MOEO-FOPID for AVR system is proposed based on multi-objective extremal optimization (MOEO) in this work. Firstly, the FOPID design problem for AVR system is formulated as a multi-objective optimization problem with three objective functions including integral of absolute error (IAE), absolute steady-state error, and settling time, and then this problem is solved by developing an improved MOEO algorithm on the basis of individual-based iterated optimization mechanism and polynomial mutation (PLM). One of the most attractive advantages is the relative simplicity of MOEO-FOPID comparing with chaotic NSGA-II-FOPID [30], NSGA-II-PID [30], and single-objective evolutionary algorithms-based FOPID algorithms such as GA-FOPID[14], PSO-FOPID [14],[24], and CAS-FOPID [14] due to its fewer adjustable parameters and single individual-based iterated optimization mechanism with only mutation operation. Furthermore, extensive experimental results have shown that the proposed MOEO-FOPID algorithm provides better or at least competitive performance than these aforementioned evolutionary algorithms in terms of accuracy and robustness. Consequently, the proposed MOEO-FOPID is considered as another novel promising multi-objective evolutionary algorithm to design FOPID controllers for AVR and other industrial systems. However, the performances of MOEO-FOPID may be further improved by tuning the adjustable parameters based on an adaptive mechanism and using other possible appropriate definition of multi-objective functions. On the other hand, the extension of MOEO-FOPID to more complex practical control systems will be another significant subject of future investigation.
|
تصویری از مقاله ترجمه و تایپ شده در نرم افزار ورد |
|
|
| دانلود رایگان مقاله انگلیسی + خرید ترجمه فارسی
|
|
| عنوان فارسی مقاله: |
طراحی کنترل کننده PID مرتبه کسری برای سیستم ولتاژ رگولاتور اتوماتیک بر اساس بهینه سازی نهایی چند هدفه |
| عنوان انگلیسی مقاله: |
Design of fractional order PID controller for automatic regulator voltage system based on multi-objective extremal optimization |
|
|