این مقاله انگلیسی ISI در نشریه ساینس دایرکت (الزویر) در 15 صفحه در سال ۲۰۱۹ منتشر شده و ترجمه آن 22 صفحه میباشد. کیفیت ترجمه این مقاله ویژه – طلایی ⭐️⭐️⭐️ بوده و به صورت کامل ترجمه شده است.
| دانلود رایگان مقاله انگلیسی + خرید ترجمه فارسی | |
| عنوان فارسی مقاله: |
کنترل پیش بینانه مدل فازی مبنی براختلال-مشاهده کننده برای فرایندهای غیرخطی با اختلالات و محدودیت های ورودی |
| عنوان انگلیسی مقاله: |
Disturbance-observer-based fuzzy model predictive control for nonlinear processes with disturbances and input constraints |
|
|
|
| مشخصات مقاله انگلیسی (PDF) | |
| سال انتشار | 2019 |
| تعداد صفحات مقاله انگلیسی | 15 صفحه با فرمت pdf |
| نوع مقاله | ISI |
| نوع نگارش | مقاله پژوهشی (Research Article) |
| نوع ارائه مقاله | ژورنال |
| رشته های مرتبط با این مقاله | مهندسی صنایع و ریاضی |
| گرایش های مرتبط با این مقاله | برنامه ریزی و تحلیل سیستم ها، تحقیق در عملیات |
| چاپ شده در مجله (ژورنال) | ISA Transactions |
| کلمات کلیدی | توربین، کنترل مبتنی بر مشاهده گر، آشفتگی، کنترل پیش بینانه مدل فازی، محدودیت ورودی، معیار شکاف، سیستم بویلر |
| کلمات کلیدی انگلیسی | Disturbance – observer-based control – Fuzzy model predictive control – Input constraint – Gap metric – Boiler–turbine system |
| ارائه شده از دانشگاه | گروه اتوماسیون ، آزمایشگاه کلیدی کنترل سیستم و پردازش اطلاعات، گروه آموزش، دانشگاه شانگهای جیو تانگ، چین |
| نمایه (index) | MedLine – Scopus – Master journals – JCR |
| نویسندگان | Lei Kong، Jingqi Yuan |
| شناسه شاپا یا ISSN | ISSN 0019-0578 |
| شناسه دیجیتال – doi | https://doi.org/10.1016/j.isatra.2018.12.041 |
| ایمپکت فاکتور(IF) مجله | 5.201 در سال 2018 |
| شاخص H_index مجله | 60 در سال 2019 |
| شاخص SJR مجله | 1.163 در سال 2018 |
| شاخص Q یا Quartile (چارک) | Q1 در سال 2018 |
| بیس | است ✓ |
| مدل مفهومی | ندارد ☓ |
| پرسشنامه | ندارد ☓ |
| متغیر | دارد ✓ |
| رفرنس | دارای رفرنس در داخل متن و انتهای مقاله ✓ |
| کد محصول | 10061 |
| لینک مقاله در سایت مرجع | لینک این مقاله در نشریه Elsevier |
| نشریه الزویر |  |
| مشخصات و وضعیت ترجمه فارسی این مقاله (Word) | |
| وضعیت ترجمه | انجام شده و آماده دانلود در فایل ورد و PDF |
| کیفیت ترجمه | ویژه – طلایی ⭐️⭐️⭐️ |
| تعداد صفحات ترجمه تایپ شده با فرمت ورد با قابلیت ویرایش | 22 صفحه (شامل 2 صفحه رفرنس انگلیسی) با فونت 14 B Nazanin |
| ترجمه عناوین تصاویر و جداول | ترجمه شده است ✓ |
| ترجمه متون داخل تصاویر | ترجمه شده است ✓ |
| ترجمه متون داخل جداول | ترجمه شده است ✓ |
| ترجمه ضمیمه | ترجمه نشده است ☓ |
| درج تصاویر در فایل ترجمه | درج شده است ✓ |
| درج جداول در فایل ترجمه | درج شده است ✓ |
| درج فرمولها و محاسبات در فایل ترجمه | به صورت عکس درج شده است ✓ |
| منابع داخل متن | به صورت عدد درج شده است ✓ |
| منابع انتهای متن | به صورت انگلیسی درج شده است ✓ |
| فهرست مطالب |
|
نکات برجسته چکیده گرافیکی چکیده مقدمه 2-مدلسازی فازی T-S مبتنی بر شکاف 3-کنترل پیش بینانه مدل فازی مبتنی بر مشاهده گر- آشفتگی فرایندهای غیرخطی 3-1- قانون کنترل پیش بینانه مدل فازی پایه 3-2-قانون کنترل پیش بینانه مدل فازی مبتنی بر مشاهده گر- آشفتگی 4-نمونه شبیه سازی 4-1- مدل فازی T-S از BTS زیربحرانی 4-2- Dobfmpc از bts زیربحرانی 5- نتیجه گیری ها منابع |
| بخشی از ترجمه |
|
چکیده این مقاله، یک طرح کنترل پیش بینانه مدل فازی مبتنی بر مشاهده گر-آشفتگی (DOBFMPC) را برای فرایند غیرخطی با توجه به آشفتگی ها و محدودیت های ورودی پیشنهاد می کند. طرح کنترل پیشنهادی، متشکل از قانون کنترل پیش بینانه مدل فازی پایه (FMPC) طراحی شده بر روی مدل فازی تاکاگی-سوگنو و قانون جبران آشفتگی است. برای ایجاد یک مدل فازی از پیچیدگی و دقت مناسب برای مدل فرایند غیرخطی، یک روش سیستمی از طریق معیار شکاف ایجاد می شود تا نقاط خطی سازی را تعیین کند. نظریه مجانبی با FMPC از نظر تئوری ثابت می شود، محدودیت های ورودی، متغیرهای کنترلی آزاد و ورودی های کنترلی آینده را به شکل قانون بازخورد حالت برآورده می کنند. سود جبران آشفتگی به گونه ای طراحی می شود که تاثیر آشفتگی از کانال های خروجی توسط قانون مرکب DOBFMPC در حالت پایدار حذف می شود. کاربرد یک سیستم بویلر-توربین زیر بحرانی ، اثربخشی طرح کنترلی پیشنهادی را نشان می دهد.
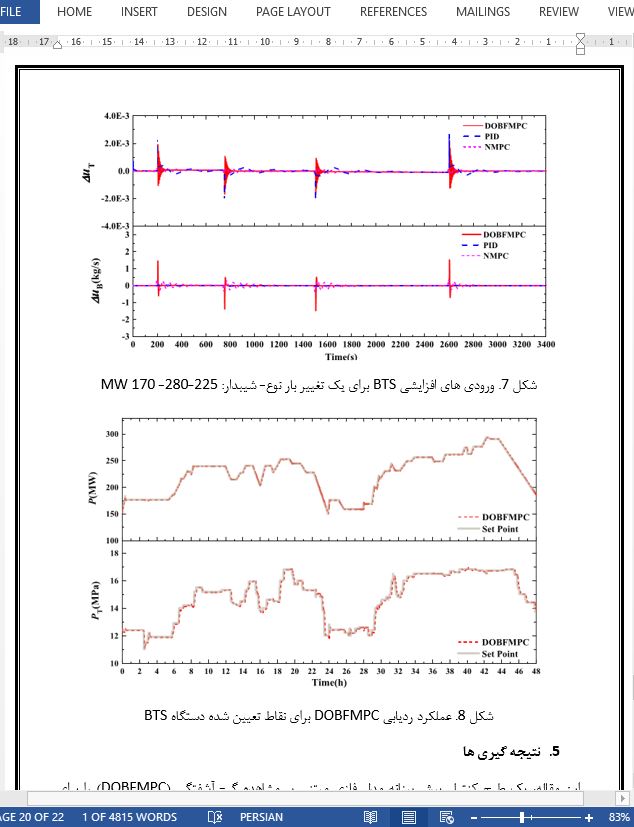
5- نتیجه گیری ها این مقاله، یک طرح کنترل پیش بینانه مدل فازی مبتنی بر مشاهده گر- آشفتگی (DOBFMPC) را برای فرایندهای غیرخطی با آشفتگی ها و محدودیت های ورودی ارائه می کند. مدل فازی T-S با دقت تقریبی مناسب و پیچیدگی با روش فرضی مبتنی بر شکاف سیستمی، ایجاد می شود. سپس، مدل آشفتگی، فرایند غیرخطی را با یکپارچگی دوره آشفتگی در مدل فازی برای افزایش تاثیر آشفتگی، نشان می دهد. FMPC پایه در مدل فازی ترکیب می شود به طوری که پایداری مجانبی تضمین شود، و محدودیت های ورودی متغیرهای کنترلی آزاد و ورودی های کنترلی آینده را به شکل قانون غیر-PDC برآورده کنند. با تخمین آشفتگی توسط مشاهده گر آشفتگی، قانون جبران آشفتگی تضمین می کند که تاثیر آشفتگی بر خروجی های سیستم حلقه بسته توسط قانون مرکب DOBFMPC در وضعیت پایدار حذف می شود. علاوه بر این، طرح کنترلی پیشنهادی، یک حالت کلی است و برای ارتباط با آشفتگی تطبیقی و غیر تطبیقی، مناسب است. مطالعات موردی انجام شده بر روی یک BTSزیر بحرانی 300 MW، کاملا طرح کنترلی فرضی را ارزیابی می کند. |
| بخشی از مقاله انگلیسی |
|
Abstract This paper proposes a disturbance-observer-based fuzzy model predictive control (DOBFMPC) scheme for the nonlinear process subject to disturbances and input constraints. The proposed control scheme is composed of the baseline fuzzy model predictive control (FMPC) law designed on the Takagi–Sugeno fuzzy model and the disturbance compensation law. To build a fuzzy model of appropriate complexity and accuracy for the nonlinear process model, a systematic approach is developed via the gap metric to determine the linearization points. With FMPC, the asymptotic stability is theoretically proved, and the input constraints are satisfied by both the free control variables and the future control inputs in the form of the state feedback law. The disturbance compensation gain is designed such that the influence of the disturbance is removed from the output channels by the composite DOBFMPC law at the steady state. The application to a subcritical boiler–turbine system demonstrate the effectiveness of the proposed control scheme.
5- Conclusions This paper presents a disturbance-observer-based fuzzy model predictive control (DOBFMPC) scheme for nonlinear processes with disturbances and input constraints. The T–S fuzzy model of appropriate approximation accuracy and complexity is developed with the proposed systematic gap-based method. The disturbance model then represents the nonlinear process by integrating a disturbance term into the fuzzy model to lump the disturbance effect. The baseline FMPC is synthesized on the fuzzy model such that the asymptotic stability is guaranteed, and the input constraints are satisfied by both the free control variables and the future control inputs in the form of non-PDC law. With the disturbance estimate by the disturbance observer, the disturbance compensation law ensures that the effect of the disturbance on the outputs of the closed-loop system is removed by the composite DOBFMPC law at the steady state. Besides, the proposed control scheme is a general case and suitable to deal with both the matched and mismatched disturbance. Case studies carried out on a 300 MW subcritical BTS fully evaluate the proposed control scheme. |
|
تصویری از مقاله ترجمه و تایپ شده در نرم افزار ورد |
|
|
| دانلود رایگان مقاله انگلیسی + خرید ترجمه فارسی | |
| عنوان فارسی مقاله: |
کنترل پیش بینانه مدل فازی مبنی براختلال-مشاهده کننده برای فرایندهای غیرخطی با اختلالات و محدودیت های ورودی |
| عنوان انگلیسی مقاله: |
Disturbance-observer-based fuzzy model predictive control for nonlinear processes with disturbances and input constraints |
|
|
|