| دانلود رایگان مقاله انگلیسی + خرید ترجمه فارسی | |
| عنوان فارسی مقاله: |
فیلتر توزیع شده کالمن با فیلترهای consensus جاسازی شده |
| عنوان انگلیسی مقاله: |
Distributed Kalman Filter with Embedded Consensus Filters |
|
|
|
| مشخصات مقاله انگلیسی (PDF) | |
| سال انتشار | 2005 |
| تعداد صفحات مقاله انگلیسی | 6 صفحه با فرمت pdf |
| نوع مقاله | ISI |
| نوع ارائه مقاله | کنفرانس |
| رشته های مرتبط با این مقاله | مهندسی برق، مهندسی کامپیوتر |
| گرایش های مرتبط با این مقاله | مهندسی الکترونیک، مهندسی کنترل، مهندسی الگوریتم ها و محاسبات |
| چاپ شده در مجله (ژورنال) | مجموعه مقالات بیست و چهارمین کنفرانس IEEE در تصمیم گیری و کنترل – Proceedings of the 44th IEEE Conference on Decision and Control |
| کلمات کلیدی | همجوشی سنسور، سیستم های تعبیه شده شبکه، شبکه های حسگر، فیلتر توزیع کالمن، فیلترهای consensus، پویایی متوسط-consensus، شبکه های تصادفی |
| کلمات کلیدی انگلیسی | sensor networks – distributed Kalman filter – sensor fusion – consensus filters – dynamic average-consensus – networked embedded systems – random networks |
| ارائه شده از دانشگاه | دانشکده دارتموث، دانشکده مهندسی Thayer، هانوفر، آلمان |
| نویسندگان | Reza Olfati-Saber |
| شناسه شاپا یا ISSN | ISSN 0191-2216 |
| شناسه دیجیتال – doi | https://doi.org/10.1109/CDC.2005.1583486 |
| بیس | نیست ☓ |
| مدل مفهومی | ندارد ☓ |
| پرسشنامه | ندارد ☓ |
| متغیر | ندارد ☓ |
| رفرنس | دارای رفرنس در داخل متن و انتهای مقاله ✓ |
| کد محصول | 9865 |
| لینک مقاله در سایت مرجع | لینک این مقاله در سایت IEEE |
| نشریه آی تریپل ای | |
| مشخصات و وضعیت ترجمه فارسی این مقاله (Word) | |
| وضعیت ترجمه | انجام شده و آماده دانلود در فایل ورد و PDF |
| کیفیت ترجمه | طلایی⭐️ |
| تعداد صفحات ترجمه تایپ شده با فرمت ورد با قابلیت ویرایش | 16 صفحه (شامل 1 صفحه رفرنس انگلیسی) با فونت 14 B Nazanin |
| ترجمه عناوین تصاویر و جداول | ترجمه شده است ✓ |
| ترجمه متون داخل تصاویر | ترجمه شده است ✓ |
| ترجمه متون داخل جداول | ترجمه شده است ✓ |
| درج تصاویر در فایل ترجمه | درج شده است ✓ |
| درج جداول در فایل ترجمه | درج شده است ✓ |
| درج فرمولها و محاسبات در فایل ترجمه | به صورت عکس درج شده است ✓ |
| منابع داخل متن | به صورت عدد درج شده است ✓ |
| منابع انتهای متن | به صورت انگلیسی درج شده است ✓ |
| فهرست مطالب |
|
چکیده 1- مقدمه 2- فیلتر کالمن: فرم اطلاعات 3- فیلتر کالمن توزیع شده و میکرو KFS 4- فیلترهای consensus 5- نتایج شبیه سازی 6- نتیجه گیری منابع |
| بخشی از ترجمه |
|
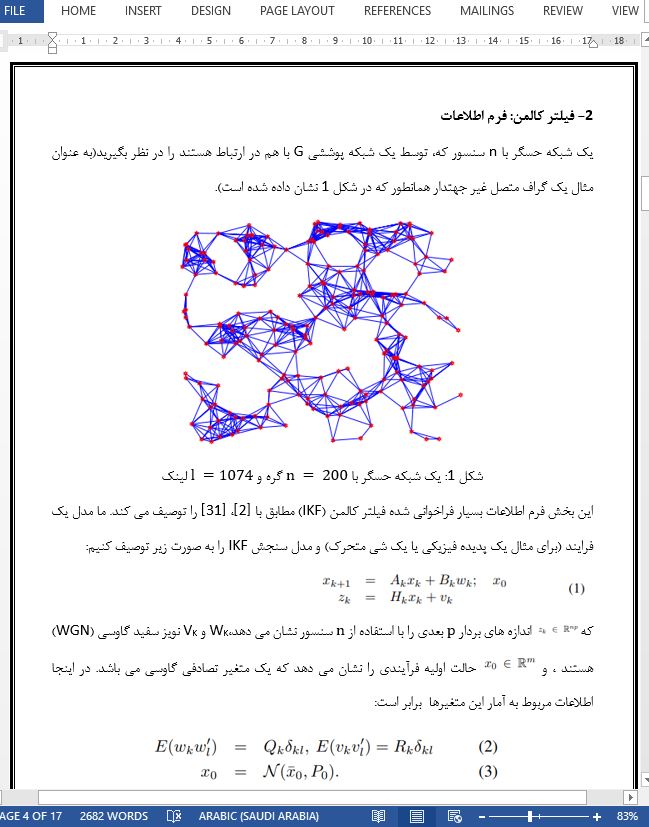
چکیده مساله فیلتر توزیع شده ی کالمن (DKF) برای شبکه های حسگر یکی از مهم ترین مسائل برآورد توزیع شده برای همجوشی حسگرهای مقیاس پذیر می باشد. این مقاله مساله DKF را با کاهش آن به دو مساله consensus مجزا با توجه به اندازه های وزنی و ماتریس های کواریانس معکوس در نظر می گیرد. مسائل همجوشی داده ها با استفاده از یک روش توزیع شده به کمک فیلترهای پایین گذر و میان گذر حل شده اند. فیلترهای consensus الگوریتمهای توزیع شده ای هستند که محاسبات میانگین consensus و سیگنالهای متغییر زمانی را امکان پذیر می سازد. خصوصیات ثابت فیلترهای consensus در مقاله CDC ’05 مورد بحث قرار گرفته است. ما نشان می دهیم که یک فیلتر کالمن مرکزی برای شبکه های حسگر می تواند به n میکرو فیلترها کلمن با ورودی های ارائه شده توسط دو نوع فیلتر consensus تجزیه گردد. این شبکه ی میکرو فیلترهای کلمن به طور کلی قادر به ارائه یک برآورد از وضعیت فرآیند (آنچه مشاهده شده است) هستند که با برآورد بدست آمده توسط یک فیلتر مرکزی (با فرض بر اینکه تمام گره ها برابر با دو مجموع مرکزی هستند) مشابه می باشند. بعد از آن، ما نشان می دهیم که فیلتر های consensus ما می توانند این مجموع ها را برآورد کنند و یک الگوریتم فیلتر کالمن توزیع شده ی تقریبی را ارائه دهد. یک گزارش دقیق از معماری محاسبات و ارتباطات الگوریتم ارائه شده است. نتایج شبیه سازی برای یک شبکه حسگر با 200 گره و بیش از 1000 لینک نیز ارائه شده است.
6- نتیجه گیری اهمیت فیلتر کالمن توزیع شده برای شبکه های حسگر توضیح داده شد. ما مساله DKF را با کاهش آن به دو مساله consensus پویای جداگانه از لحاظ اندازه های وزن و ماتریس های کوواریانس معکوس که می توانند به عنوان دو مساله ترکیب داده ها با ماهیت متفاوت لحاظ کردند، در نظر گرفتیم. هر دو مساله ترکیب داده ها که حل شده بودند یک روش توزیع شده با استفاده از فیلترهای consensus هستند. فیلترهای consensus ، الگوریتمهای توزیع شده ای هستند که محاسبه سیگنال های متغیر زمانی و میانگین consensus را ممکن می سازند. ما یک فیلتر consensus پایین گذر را برای همجوشی اندازه گیری ها و یک فیلتر consensus میان گذر را برای همجوشی ماتریس ها کوواریانس معکوس اجرا کردیم. توجه داشته باشید که ویژگی های پایداری فیلترهای consensus در یک مقاله همراه مورد بحث قرار گرفته است [24]. |
| بخشی از مقاله انگلیسی |
|
Abstract The problem of distributed Kalman filtering (DKF) for sensor networks is one of the most fundamental distributed estimation problems for scalable sensor fusion. This paper addresses the DKF problem by reducing it to two separate dynamic consensus problems in terms of weighted measurements and inverse-covariance matrices. These to data fusion problems are solved is a distributed way using lowpass and band-pass consensus filters. Consensus filters are distributed algorithms that allow calculation of average-consensus of time-varying signals. The stability properties of consensus filters is discussed in a companion CDC ’05 paper [24]. We show that a central Kalman filter for sensor networks can be decomposed into n micro-Kalman filters with inputs that are provided by two types of consensus filters. This network of micro-Kalman filters collectively are capable to provide an estimate of the state of the process (under observation) that is identical to the estimate obtained by a central Kalman filter given that all nodes agree on two central sums. Later, we demonstrate that our consensus filters can approximate these sums and that gives an approximate distributed Kalman filtering algorithm. A detailed account of the computational and communication architecture of the algorithm is provided. Simulation results are presented for a sensor network with 200 nodes and more than 1000 links.
VI- CONCLUSIONS The importance of distributed Kalman filtering (DKF) for sensor networks was discussed. We addressed the DKF problem by reducing it to two separate dynamic consensus problems in terms of weighted measurements and inversecovariance matrices that can be viewed as two data fusion problems with different natures. Both data fusion problems were solved is a distributed way using consensus filters. Consensus filters are distributed algorithms that allow calculation of average-consensus of time-varying signals. We employed a low-pass consensus filter for fusion of the measurements and a band-pass consensus filter for fusion of the inversecovariance matrices. Note that the stability properties of consensus filters is discussed in a companion paper [24]. |
|
تصویری از مقاله ترجمه و تایپ شده در نرم افزار ورد |
|
|
| دانلود رایگان مقاله انگلیسی + خرید ترجمه فارسی | |
| عنوان فارسی مقاله: |
فیلتر توزیع شده کالمن با فیلترهای consensus جاسازی شده |
| عنوان انگلیسی مقاله: |
Distributed Kalman Filter with Embedded Consensus Filters |
|
|
|