| دانلود رایگان مقاله انگلیسی + خرید ترجمه فارسی | |
| عنوان فارسی مقاله: |
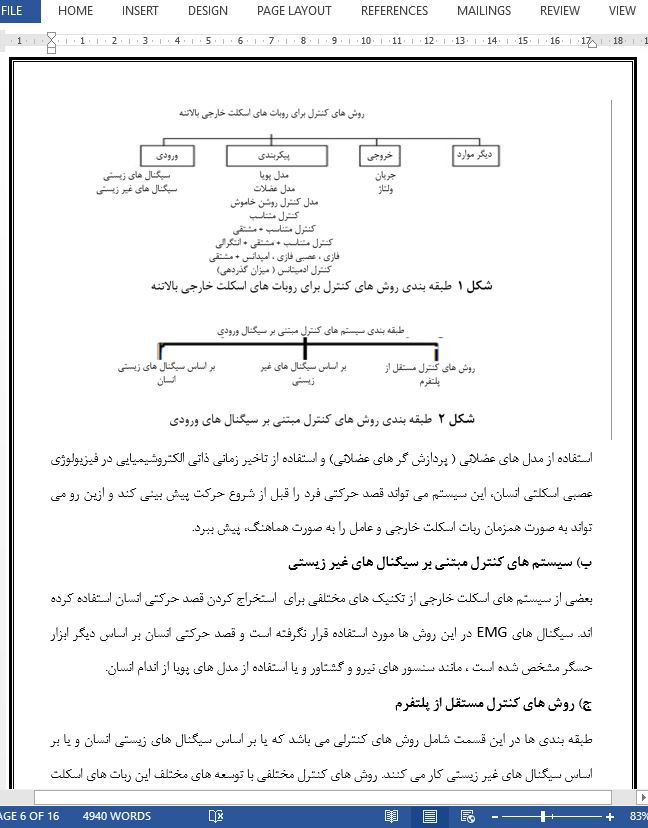
روش شناسی کنترل برای ربات های اسکلتون بالاتنه |
| عنوان انگلیسی مقاله: |
Control Methodologies for Upper Limb Exoskeleton Robots |
|
|
|
| مشخصات مقاله انگلیسی (PDF) | |
| سال انتشار | 2012 |
| تعداد صفحات مقاله انگلیسی | 6 صفحه با فرمت pdf |
| رشته های مرتبط با این مقاله | مهندسی برق |
| گرایش های مرتبط با این مقاله | هوش ماشین و رباتیک، مهندسی کنترل |
| چاپ شده در مجله (ژورنال) | سمپوزیوم بین المللی در مورد سیستم ادغام – International Symposium on System Integration (SII) |
| کلمات کلیدی | روش های کنترل، ربات های استخوان بندی خارجی ( اسکلتون)، تعامل انسان و ماشین، کنترل امپدانس، کنترل عصبی – فازی |
| ارائه شده از دانشگاه | گروه مهندسی مکانیک، دانشگاه مورتووا، سریلانکا |
| نویسندگان | J.M.P Gunasekara, R.A.R.C Gopura, T.S.S Jayawardane and S.W.H.M.T.D Lalitharathne |
| شناسه شاپا یا ISSN | ISSN 978-1-4673-1497-8 |
| شناسه دیجیتال – doi | https://doi.org/10.1109/SII.2012.6427387 |
| رفرنس | دارد ✓ |
| کد محصول | 9570 |
| لینک مقاله در سایت مرجع | لینک این مقاله در سایت IEEE |
| نشریه آی تریپل ای | |
| مشخصات و وضعیت ترجمه فارسی این مقاله (Word) | |
| وضعیت ترجمه | انجام شده و آماده دانلود |
| کیفیت ترجمه | طلایی⭐️ |
| تعداد صفحات ترجمه تایپ شده با فرمت ورد با قابلیت ویرایش | 15 صفحه با فونت 14 B Nazanin |
| ترجمه عناوین تصاویر و جداول | ترجمه شده است ✓ |
| ترجمه متون داخل تصاویر | ترجمه شده است ✓ |
| ترجمه متون داخل جداول | ترجمه شده است ✓ |
| درج تصاویر در فایل ترجمه | درج شده است ✓ |
| درج جداول در فایل ترجمه | درج شده است ✓ |
| منابع داخل متن | درج نشده است ☓ |
| فهرست مطالب |
|
چکیده 1- مقدمه 2- طبقه بندی کردن روش های کنترل ربات های اسکلت خارجی در بالاتنه الف ) روش های کنترل مبتنی بر سیگنال های زیستی انسانی ب) سیستم های کنترل مبتنی بر سیگنال های غیر زیستی ج) روش های کنترل مستقل از پلتفرم 3- توسعه در روش های کنترل مبتنی بر سیگنال های زیستی انسان الف) روش کنترل مبتنی بر EMG با محوریت مدل عضلانی ب) کنترل متناسب مبتنی بر EMG ج) کنترل عصبی – فازی مبتنی بر EMG 4- توسعه سیستم های کنترل مبتنی بر سیگنال های غیر زیستی الف ) کنترل نیرویی اسکلت خارجی بالاتنه ب) ربات های اسکلت خارجی کنترل شده با نیرو ج) کنترل کننده های عصبی – فازی سنسور های انبساط فیبر عضلات 5- توسعه روش های کنترل مستقل از پلتفرم الف) کنترل اسکلت خارجی از طریق بهره ی ساختگی (FG) در مدل انسانی ب) کنترل کننده سازگاری عصبی – فازی ج) کنترل ادمیتانس در فضای مشترک و فضای وظیفه 6- جهت گیری های آینده و تحقیق و توسعه 7- جمع بندی |
| بخشی از ترجمه |
|
چکیده یک ربات استخوان بندی خارجی ( اسکلتون) نوعی از سیستم های انسان – ماشین است که بیشتر از ترکیبی از هوش انسانی و توان ماشین استفاده می کند. این سیستم های رباتیک این روز ها برای کاربرد های مختلف مانند بازتوانی، تقویت توان انسانی، همیاری در حرکت، واقعیت مجازی و غیره مورد استفاده قرار می گیرند. فعالیت موفق یک ربات استخوان بندی خارجی ( اسکلتون) مبتنی بر انتخاب صحیح و طراحی مناسب روش های کنترل می باشد. این مقاله روش شناسی های کنترل مورد استفاده در استخوان بندی خارجی ( اسکلتون) های بالاتنه در انسان را بررسی می کند. در این مرور، روش های کنترل مورد استفاده برای استخوان بندی خارجی ( اسکلتون) رباتیک در سه دسته ، تقسیم بندی می شوند : سیستم های کنترل مبتنی بر سیگنال های زیستی انسانی، غیر سیگنال های زیستی انسانی و سیستم های کنترل مستقل از پلتفرم اصلی. انواع مختلف از روش ها در این دسته ها، در این مقاله بررسی شده و با هم مقایسه گشته اند.
7- جمع بندی |
| بخشی از مقاله انگلیسی |
|
Abstract An exoskeleton robot is kind of a man-machine system which mostly uses combination of human intelligence and machine power. These robotic systems are used for different applications such as rehabilitation, human power amplification, motion assistance, virtual reality etc. Successful operation of an exoskeleton robot depends on correct selection of design and control methodologies. This paper reviews control methodologies used in upper limb exoskeleton robots. In the review, the control methods used in the exoskeleton robots are classified into three categories: control system based on human biological signal, nonbiological signal and platform independent control system. Different types of control methods under each category are compared and reviewed.
VII- CONCLUSION This paper reviewed recent developments in control methodologies of exoskeleton robot during last seven years (from 2005). This review has classified control methodologies into three categories. Different control method of each category is reviewed. EMG based control methods are extensively used by early exoskeleton robots to control them based on the human motion intention. Some drawbacks of EMG control method had identified during the review. Structure of control system is affected by its degree of freedom (DoF). Higher DoF, exoskeleton robot shows high manuability, on the other hand centralized control system is not support for its manuability. It likes a two end question and designer has to scarify one of an important selection. However, distributed control configuration is a good solution to overcome manuability against to higher DoF. Further, many designs under review has based on centralized control method and there is an opportunity for distributed control methods too. Some exoskeleton control methods have used different physical parameters for their controller. Those are not based on human biological signal and can be classified as position, force, speed, torque or combinations of it.
|
|
تصویری از مقاله ترجمه و تایپ شده در نرم افزار ورد |
|
|
| دانلود رایگان مقاله انگلیسی + خرید ترجمه فارسی | |
| عنوان فارسی مقاله: |
روش شناسی کنترل برای ربات های اسکلتون بالاتنه |
| عنوان انگلیسی مقاله: |
Control Methodologies for Upper Limb Exoskeleton Robots |
|
|
|