این مقاله انگلیسی ISI در نشریه ساینس دایرکت (الزویر) در 9 صفحه در سال 2017 منتشر شده و ترجمه آن 12 صفحه میباشد. کیفیت ترجمه این مقاله ویژه – طلایی ⭐️⭐️⭐️ بوده و به صورت کامل ترجمه شده است.
| دانلود رایگان مقاله انگلیسی + خرید ترجمه فارسی
|
|
| عنوان فارسی مقاله: |
ادغام داده های چندحسگر با شبکه های عصبی المان |
| عنوان انگلیسی مقاله: |
Multisensor data fusion using Elman neural networks |
|
|
| مشخصات مقاله انگلیسی (PDF) | |
| سال انتشار | 2017 |
| تعداد صفحات مقاله انگلیسی | 9 صفحه با فرمت pdf |
| رشته های مرتبط با این مقاله | مهندسی کامپیوتر و برق |
| گرایش های مرتبط با این مقاله | هوش ماشین و رباتیک، مهندسی کنترل، مهندسی الگوریتم ها و محاسبات و هوش مصنوعی |
| مجله | ریاضی کاربردی و محاسباتی – Applied Mathematics and Computation |
| دانشگاه | دانشکده محاسبات، دانشکده مهندسی کامپیوتر، لهستان |
| کلمات کلیدی | شبکه عصبی، AHRS، IMU، فیوژن سنسور، ناوبری درونی |
| شناسه شاپا یا ISSN | ISSN 0096-3003 |
| رفرنس | دارد ✓ |
| کد محصول | 358 |
| لینک مقاله در سایت مرجع | لینک این مقاله در نشریه Elsevier |
| شناسه دیجیتال – doi | https://doi.org/10.1016/j.amc.2017.02.031 |
| نشریه الزویر |  |
| مشخصات و وضعیت ترجمه فارسی این مقاله (Word) | |
| کیفیت ترجمه | ویژه – طلایی ⭐️⭐️⭐️ |
| تعداد صفحات ترجمه تایپ شده با فرمت ورد با قابلیت ویرایش و فونت 14 B Nazanin | 12 صفحه |
| ترجمه عناوین تصاویر و جداول | ترجمه شده است ✓ |
| ترجمه متون داخل تصاویر | ترجمه شده است ✓ |
| ترجمه متون داخل جداول | ترجمه شده است ✓ |
| درج تصاویر در فایل ترجمه | درج شده است ✓ |
| درج جداول در فایل ترجمه | درج شده است ✓ |
| درج فرمولها و محاسبات در فایل ترجمه به صورت عکس | درج شده است ✓ |
| منابع داخل متن | به صورت عدد درج شده است ✓ |
- فهرست مطالب:
چکیده
1-مقدمه
2- ترکیب داده های چند سنسوره
3- شبکه عصبی مصنوعی
4- نتایج آزمایشگاهی
5- نتایج
- بخشی از ترجمه:
چکیده
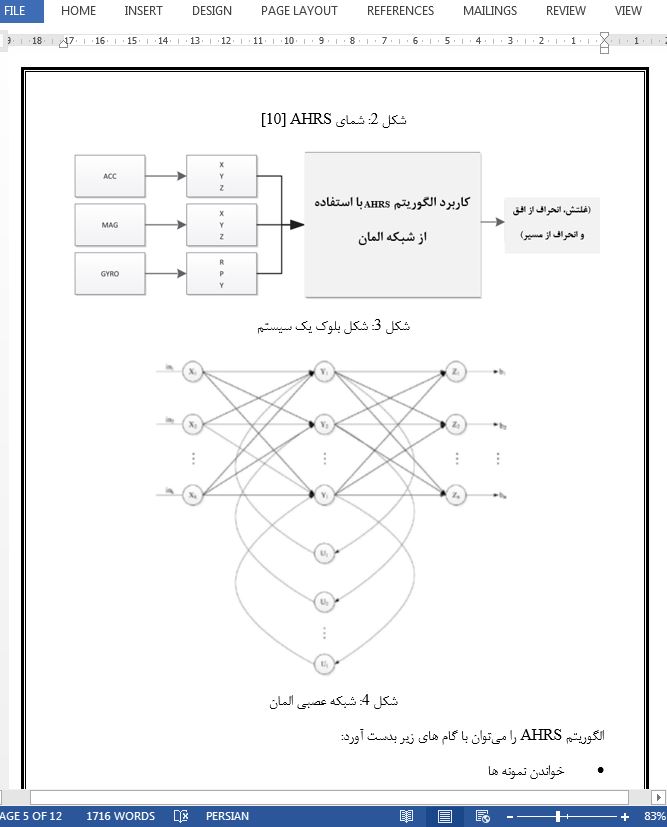
این مقاله یک سیستم مسیریابی را بر اساس شبکه عصبی مصنوعی (ANN) المان ارائه می دهد. عمل ترکیب داده ها حاصل از سنسورهای مختلف بوسیله ANN آموزشی درک شده است. تعیین موقعیت در فضا موضوعی غیر خطی است، از این رو هر نوع ANN را نمی توان برای این عمل بکار برد. ANN المان به علت ساخت و کاربرد موفق آن در مسائل غیر خطی که به پیشبینی نیازمندند، انتخاب شده است. شبکه المان از سه لایه تشکیل شده است. لایه ای از واحدهای لایه ای مخفی که به لایه مخفی متصل شده است. لایه حساس به متن ذخیره مقادیر واحدهای مخفی قبلی را قادر میسازد. با این لایه، پیشبینی در دستورات سلسه مراتبی ممکن می باشد. این امر تاثیر حافظه متنی است که اطلاعات حوادث قبلی در آن ذخیره میگردد. شبکه عصبی تک محوره استاندارد دیگری قادر به فراهم نمودن این نوع عملکرد نیست. سیستم متشکل از سنسورهای MEMS (سیستم های ریز الکترومکانیکی) می باشد که بر پایه IMU (واحد اندازه گیری لختی) استوار است. IMU از ژیروسکوپ ها، شتاب سنج ها و مغناطیس سنج هایی تشکیل شده که شتاب های سه بعدی خطی و نرخهای زاویه ای را ارائه می دهد. این یک مجموعه کلاسیک از سنسورها برای تعیین موقعیت فضایی است. این مطالعه نتایج کاربرد الگوریتم هایی برای تعیین موقعیت فضایی با استفاده از ANN المان را ارائه می دهد. نمونه داده های ANN آزمایشی حین تست پرواز کوادکوپتر جمع آوری گردید. این مقاله عملکرد اشکال مختلف ANN المان را ارائه میدهد. سیستم ارائه شده تجمیع آسان سایر سنسورها مانند دریافت کننده های GPS/GLONASS را ممکن می سازد.
5- نتایج
نتایج بدست آمده نشان میدهد که فرضیات درست بوده اند. با مقایسه نتایج می¬توان نتیجه گرفت که مقادیر بدست آمده با استفاده از ANN چندان با محاسبات حاصل از الگوریتم AHRS تفاوتی ندارند. با این حال، با مقایسه مقادیر خروجی ANN و مقادیر محاسبه شده می¬توان خطای بزرگی را مشاهده نمود. این خطا به وسیله دینامیک بالای داده های ورودی شبکه عصبی حاصل شده است. مطالعات آینده به مجموعه داده های بیشتری برای فراگیری شبکه نیاز دارند. این نتایج نشان می¬دهند که می¬توانیم به طور موفقیت آمیزی ANN را به عنوان جایگزین محاسبات پیچیده استفاده کنیم. با این حال، باید تحقیق جامعی بر انتخاب پارامتری ANN انجام شود. تحقیقات آینده باید با سنسورهای اضافی مانند دریافت کننده های GPS و فشار سنج غنی گردد. این سنسورها دقت موقعیت یابی را بهبود می بخشند ، تحقیق را بسیار متنوع نموده و متغیرهای بیشتری را برای تحلیل ایجاد می¬نماید. همچنین برای مقایسه نتایج با انواع دیگر شبکه های عصبی مصنوعی برنامه ریزی شده است.
- بخشی از مقاله انگلیسی:
Abstract
The paper presents a navigation system based on Elman Artificial Neural Network (ANN). The task of data fusion from different sensors is realized by trained ANN. Determining position in space is an issue of nonlinear hence. Not every type of ANN is used for such a task. Choice of Elman ANN was dictated by its construction and successfully applications to nonlinear problems requiring prediction. Elman network is composed of three layers. Comprises a layer of hidden layer units context which is connected to the hidden layer. Context-sensitive layer allows for store the values of previous hidden units. With this layer prediction is possible in sequential order. This is the effect of contextual memory where information is stored about what it was before. This kind of functionality is not able to provide any other standard neural network unidirectional. The system consists of MEMS (Micro Electro-Mechanical Systems) sensors, which are based on IMU (Inertial Measurement Unit). IMU is composed from gyroscopes, accelerometers and magnetometers which provide three dimensional linear accelerations and angular rates. This is a classic set of sensors for determining the position in space. The study presents the results of the implementation of algorithms for determining the position in space using trained Elman ANN. The data samples to train ANN were collected during the test flight of Quadrocopter. Paper presents the performance for different configurations of Elman ANN. Presented system provides easy addition of other sensors e.g. GPS/GLONASS receiver.
5. Conclusions
The obtained results allow to conclude that the assumptions were correct. Comparing the results it can be concluded that the values obtained using the ANN do not differ significantly from these calculated using the AHRS algorithm. However, comparing the differences between the values of the ANN output and the calculated values can be seen a large error values. This is caused by the high dynamics of the neural network input data. Future studies need to prepare more data sets to learn the network. This shows that we can successfully use the ANN as an alternative to complicated calculations. However, one should carry out a more thorough investigation of the selection of ANN parameters. Future research should be enriched with additional sensors such as GPS receiver and barometer. These sensors will improve the positioning accuracy. And that will make the research will be more varied with more variables for analysis. It is also planned to compare the results with the use of other types of artificial neural networks.
|
تصویری از مقاله ترجمه و تایپ شده در نرم افزار ورد |
|
|
| دانلود رایگان مقاله انگلیسی + خرید ترجمه فارسی
|
|
| عنوان فارسی مقاله: |
ادغام داده های چندحسگر با شبکه های عصبی المان |
| عنوان انگلیسی مقاله: |
Multisensor data fusion using Elman neural networks |
|
|