| دانلود رایگان مقاله انگلیسی + خرید ترجمه فارسی | |
| عنوان فارسی مقاله: |
متد پسگام برای یک بازوی مکانیکی با مفصل انعطاف پذیر تک پیوندی با الگوریتم ژنتیک |
| عنوان انگلیسی مقاله: |
Backstepping Method For A Single-Link Flexible-Joint Manipulator Using Genetic Algorithm |
|
|
|
| مشخصات مقاله انگلیسی (PDF) | |
| سال انتشار | 2011 |
| تعداد صفحات مقاله انگلیسی | 10 صفحه با فرمت pdf |
| نوع مقاله | ISI |
| نوع ارائه مقاله | ژورنال |
| رشته های مرتبط با این مقاله | مهندسی برق |
| گرایش های مرتبط با این مقاله | مهندسی کنترل، هوش ماشین و رباتیک |
| چاپ شده در مجله (ژورنال) | مجله بین المللی محاسبات، اطلاعات و کنترل نوآورانه – International Journal of Innovative Computing |
| کلمات کلیدی | الگوریتم ژنتیک، بازوی مکانیکی اتصال انعطاف پذیر تک پیوندی، تابع Lyapunov، روش Backstepping |
| کلمات کلیدی انگلیسی | Single-link flexible-joint manipulator – Lyapunov function – Backstepping method – Genetic algorithm |
| ارائه شده از دانشگاه | گروه مهندسی، لاهيجان، گيلان، ايران |
| نمایه (index) | Scopus |
| نویسندگان | Ali Reza Sahab and Mohammad Reza Modabbernia |
| شناسه شاپا یا ISSN | ISSN 1349-4198 |
| ایمپکت فاکتور(IF) مجله | 0.983 در سال 2018 |
| شاخص H_index مجله | 47 در سال 2019 |
| شاخص SJR مجله | 0.453 در سال 2018 |
| شاخص Q یا Quartile (چارک) | Q2 در سال 2018 |
| بیس | نیست ☓ |
| مدل مفهومی | ندارد ☓ |
| پرسشنامه | ندارد ☓ |
| متغیر | ندارد ☓ |
| رفرنس | دارای رفرنس در داخل متن و انتهای مقاله ✓ |
| کد محصول | 9856 |
| مشخصات و وضعیت ترجمه فارسی این مقاله (Word) | |
| وضعیت ترجمه | انجام شده و آماده دانلود در فایل ورد و PDF |
| کیفیت ترجمه | طلایی⭐️ |
| تعداد صفحات ترجمه تایپ شده با فرمت ورد با قابلیت ویرایش | 15 صفحه (شامل 1 صفحه رفرنس انگلیسی) با فونت 14 B Nazanin |
| ترجمه عناوین تصاویر و جداول | ترجمه شده است ✓ |
| ترجمه متون داخل تصاویر | ترجمه نشده است ☓ |
| ترجمه متون داخل جداول | ترجمه نشده است ☓ |
| درج تصاویر در فایل ترجمه | درج شده است ✓ |
| درج جداول در فایل ترجمه | درج شده است ✓ |
| درج فرمولها و محاسبات در فایل ترجمه | به صورت عکس درج شده است ✓ |
| منابع داخل متن | به صورت عدد درج شده است ✓ |
| منابع انتهای متن | به صورت انگلیسی درج شده است ✓ |
| فهرست مطالب |
|
چکیده 1- مقدمه 2-مدل سازی و فرمولبندی مساله 3- روش Backstepping 4- کنترل سیستم بازو مکانیکی 5- ردیابی مسیر مورد نظر 6- الگوریتم ژنتیک 7- شبیه سازی عددی 8- نتیجه گیری منابع |
| بخشی از ترجمه |
|
چکیده بازوهای مکانیکی انعطاف پذیر در صنایع بسیار مورد استفاده قرار گرفته اند. در این مقاله، روش پسگام (BM) برای کنترل بازوهای مکانیکی انعطاف پذیر استفاده شده اند. BM شامل پارامترهایی است که مقادیر مثبت را می پذیرند. پارامترها معمولا به روشهای متفاوت انتخاب می شوند. سیستم پاسخ های متفاوتی به هر مقدار می دهد. در این روش، پارامترهایی وجود دارند، که اگر به خوبی تعریف نشوند، ممکن است باعث کاهش عملکرد گردند. انتخاب مناسب پارامترها برای به دست آوردن پاسخ درست لازم است زیرا انتخاب نامناسب آنها منجر به پاسخ های اشتباه و یا حتی می تواند منجر به بی ثباتی سیستم شود. الگوریتم ژنتیک (GA) برای محاسبه پارامترهای بهینه برای کنترل کننده backstepping سیستم های بازو مکانیکی اتصال-انعطاف پذیر تک لایه استفاده شده است. GA می تواند مقادیر بهینه و مناسب را برای پارامترها انتخاب کند. GA تابع برازش را به حداقل می رساند، بطوریکه مقادیر بهینه برای پارامترها پیدا خواهد شد. تابع برازش انتخاب شده برای به حداقل رساندن حداقل مربع خطا تعریف شده است. تابع برازش خطای سیستم را به سرعت به صفر می رساند. بدین ترتیب، تابع برازش باعث می شود که سیستم یک زمان تنظیم کوتاه و مطلوب داشته باشد. تابع برازش همچنین یک کنترل کننده بهینه را ایجاد می کند و باعث خطا برای رسیدن به مقدار حداقل می گردد. این هیبرید منجر به کنترل کننده backstepping (OBM) می شود.
8- نتیجه گیری یک بازومکانیکی تک پیوندی بیشترین بازومکانیکی است که به طور گسترده در صنایع استفاده می شود. در این مقاله یک بازومکانیکی پیوند انعطاف پذیر تک پیوندی با BMکنترل شده است. کنترل کننده طراحی شده شامل پارامترهایی است که مقادیر مثبت را می پذیرند. این سیستم کنترل شده رفتارهای متفاوتی برای مقادیر مختلف این پارامترها ارائه می دهد. انتخاب نامناسب پارامترها موجب رفتار نامناسب می شود که ممکن است باعث مشکلات جدی مانند بی ثباتی سیستم گردد. بهینه سازی این پارامترها لازم است. یکی از شناخته شده ترین روشهای بهینه سازیGA است. GA کنترل کننده را جهت بدست آوردن مقادیر مناسب و بهینه برای پارامترها بهینه سازی می کند. به همین دلیل، GA تابع برازش را جهت یافتن حداقل مقدار فعلی برای آن به حداقل می رساند. از سوی دیگر، تابع برازش حداقل مقدار را برای به حداقل رساندن خطاهای مربع پیدا می کند. نتایج شبیه سازی نشان می دهد که زمان تنظیم و overshoot ، به حداقل مقادیری دست می یابد که مقادیر بهینه تری را در مقایسه با روش های قبلی نشان می دهد. همچنین تابع برازش می تواند برای داشتن نتایج مناسب دیگری با هدف کنترل متفاوت انتخاب گردد. |
| بخشی از مقاله انگلیسی |
|
Abstract Flexible manipulators are extensively used in industries. In this paper, backstepping method (BM) is used to control flexible manipulator. BM consists of parameters which accept positive values. The parameters are usually chosen variously. The system responses differently for each value. In this method, some paremeters exist, which, if not defined well, may cause some performance degrade. It is necessary to select proper parameters to obtain a good response because the improper selection of the parameters leads to inappropriate responses or even may lead to instability of the system. Genetic algorithms (GA) are used to compute the optimal parameters for the backstepping controller of single-link flexible-joint manipulator systems. GA can select appropriate and optimal values for the parameters. GA minimize the fitness function, so the optimal values for the parameters will be found. Selected fitness function is defined to minimize the least square error. Fitness function enforces the system error to decay to zero rapidly. Hence, it causes the system to have a short and optimal setting time. Fitness function also makes an optimal controller and causes overshoot to reach to its minimum value. This hybrid leads to optimal backstepping controller (OBM).
8- Conclusion A single link manipulator is the most manipulators are extensively used in industries. In this paper, a single-link flexible-joint manipulator is controlled with BM. The designed controller consists of parameters which accept positive values. The controlled system presents different behavior for different values of these parameters. Improper selection of the parameters causes an improper behavior which may cause serious problems such as instability of system. It is needed to optimize these parameters. One of well known optimization method is GA. GA optimize the controller to gain optimal and proper values for the parameters. For this reason, GA minimize the fitness function to find minimum current value for it. On the other hand, fitness function finds minimum value to minimize least square errors. Simulation results show that the setting time and overshoot, reach to their minimum values that is demonstrated to have more optimal values when compared with previous methods. Also for different control goal performance different fitness function can be selected to have other appropriate results. |
|
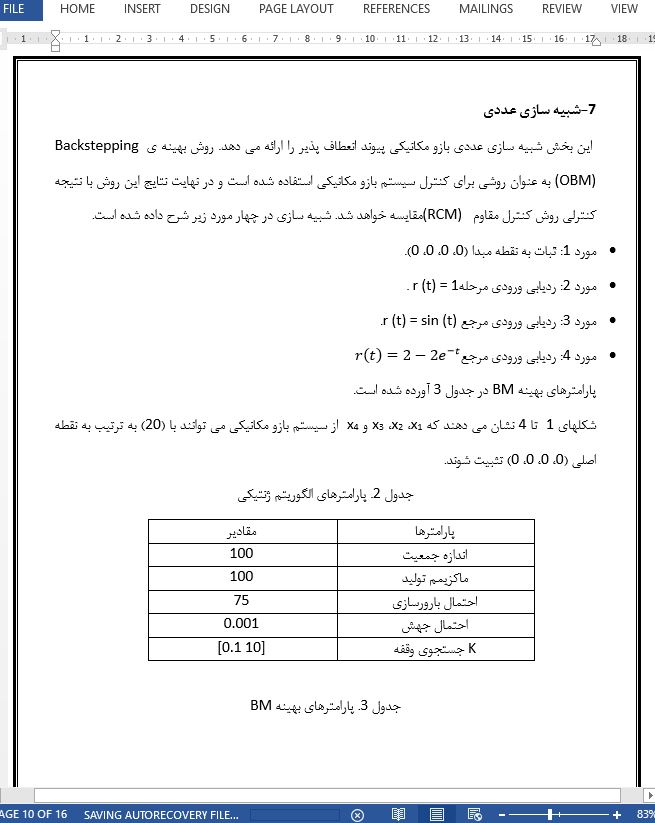
تصویری از مقاله ترجمه و تایپ شده در نرم افزار ورد |
|
|
| دانلود رایگان مقاله انگلیسی + خرید ترجمه فارسی | |
| عنوان فارسی مقاله: |
متد پسگام برای یک بازوی مکانیکی با مفصل انعطاف پذیر تک پیوندی با الگوریتم ژنتیک |
| عنوان انگلیسی مقاله: |
Backstepping Method For A Single-Link Flexible-Joint Manipulator Using Genetic Algorithm |
|
|
|