گروه آموزشی ترجمه فا اقدام به ارائه ترجمه مقاله با موضوع ” کنترل حالت لغزان فازی انطباقی با فیلترهای متغیر حالت ” در قالب فایل ورد نموده است که شما عزیزان میتوانید پس از دانلود رایگان مقاله انگلیسی و نیز مطالعه نمونه ترجمه و سایر مشخصات، ترجمه را خریداری نمایید.
| دانلود رایگان مقاله انگلیسی + خرید ترجمه فارسی
|
|
| عنوان فارسی مقاله: |
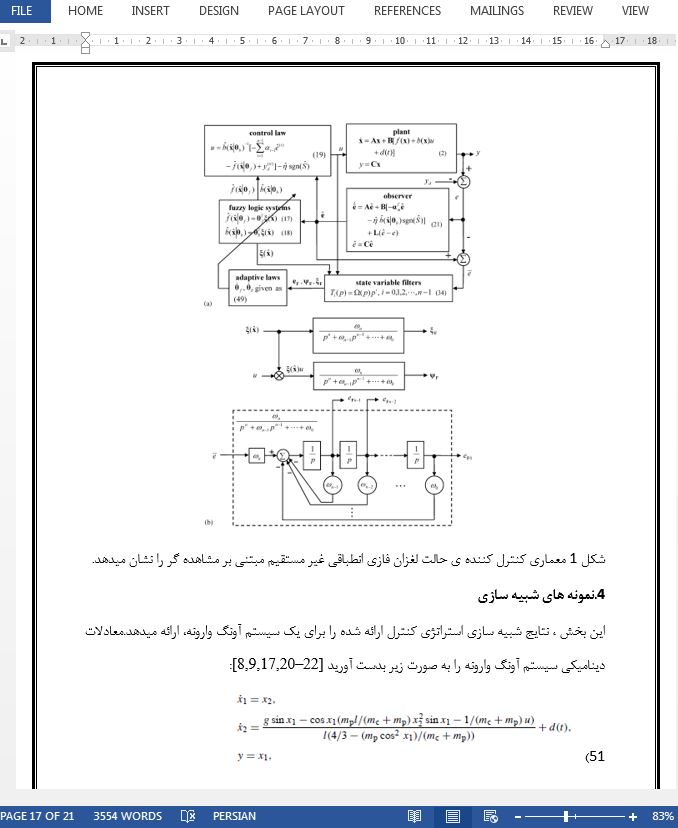
کنترل حالت لغزان فازی انطباقی غیر مستقیم مبتنی بر مشاهده گر با فیلترهای متغیر حالت برای سیستم های دینامیکی غیر خطی ناشناخته |
| عنوان انگلیسی مقاله: |
Observer-based indirect adaptive fuzzy sliding mode control with state variable filters for unknown nonlinear dynamical systems |
|
|
| مشخصات مقاله انگلیسی (PDF) | |
| سال انتشار | 2005 |
| تعداد صفحات مقاله انگلیسی | 17 صفحه با فرمت pdf |
| رشته های مرتبط با این مقاله | مهندسی برق |
| گرایش های مرتبط با این مقاله | مهندسی الکترونیک، مکاترونیک و مهندسی کنترل |
| مجله | مجموعه های فازی و سیستم ها – Fuzzy Sets and Systems |
| دانشگاه | گروه مهندسی برق، دانشگاه تاتونگ، تایوان |
| کلمات کلیدی | کنترل فازی، کنترل حالت لغزان فازی، فیلترهای متغیر حالت |
| شناسه شاپا یا ISSN | ISSN 2005.04.016 |
| رفرنس | دارد |
| لینک مقاله در سایت مرجع | لینک این مقاله در نشریه Elsevier |
| نشریه | Elsevier |
| مشخصات و وضعیت ترجمه فارسی این مقاله (Word) | |
| تعداد صفحات ترجمه تایپ شده با فرمت ورد با قابلیت ویرایش و فونت 14 B Nazanin | 20 صفحه |
| ترجمه عناوین تصاویر | ترجمه شده است |
| ترجمه متون داخل تصاویر | ترجمه نشده است |
| درج تصاویر در فایل ترجمه | درج شده است |
| درج جداول در فایل ترجمه | ندارد |
- فهرست مطالب:
چکیده
1.مقدمه
2.طراحی FSMC مبتنی بر مشاهده گر
3. FSMC انطباقی غیر مستقیم مبتنی بر مشاهده گر با فیلترهای متغیر حالت
4.نمونه های شبیه سازی
5.نتیجه گیری ها
- بخشی از ترجمه:
5.نتیجه گیری ها
در این مقاله، ما یک روش را برای طراحی کنترل کننده ی حالت لغزان فازی انطباقی غیر مستقیم مبتنی بر مشاهده گر را با فیلترهای متغیر حالت برای کنترل یک دسته ی خاص از سیستم های دینامیکی غیر خطی مجهول را ارائه داده ایم، که در آن همه ی حالات برای سنجش موجود نیستند.ما اولا مدلهای فازی را برای توصیف رفتار ورودی/خروجی سیستم دینامیکی غیر خطی میسازیم.آنگاه، یک مشاهده گر برای تخمین بردار خطای بررسی بکار میرود.بر مبنای مشاهده گر، یک کنترل کننده ی مدل لغزان فازی، برای تخمین بردار خطای بررسی بکار میرود.بر مبنای مشاهده گر، یک کنترل کننده ی لغزان فازی، برای کسب عملکرد بررسی توسعه می یابند.با گذشت از بردار خطای مشاهده به یک مجموعه از فیلترهای متغیر حالت، یک بردار خطای مشاهده ی فیلتر شده ، کسب میشود.پارامترهای آزاد مدلهای فازی ، میتواند با قوانین انطباقی تنظیم میشوند، که بر مبنای بردار خطای مشاهده ی فیلتر شده و روش ترکیب لیاپانو است.با استراتژی کنترل ارائه شده، پایداری سیستم کنترل کلی ،میتواند تضمین میشود.نتایج شبیه سازی نشان میدهد استراتژی کنترل ارائه شده میتواند در یک عملکرد بررسی مناسب ظاهر شود و در برابر نویز خارجی قوی است.
- بخشی از مقاله انگلیسی:
5. Conclusions
In this paper, we have proposed a method for designing an observer-based indirect adaptive fuzzy sliding mode controller with state variable filters for the control ofa certain class ofunknown nonlinear dynamic systems, in which not all the states are available for measurement. We first construct the fuzzy models to describe the input/output behavior ofthe nonlinear dynamic system. Then, an observer is employed to estimate the tracking error vector. Based on the observer, a fuzzy sliding model controller is developed to achieve the tracking performance. By passing the observation error vector to a set of state variable filters, a filtered observation error vector is obtained. The free parameters of the fuzzy models can be adjusted by the adaptive laws, based on the filtered observation error vector and the Lyapunov synthesis method. With the proposed control strategy, the stability ofthe overall control system can be guaranteed. The simulation results show that the proposed control strategy can turn in a good tracking performance and is robust against the external noise.
|
تصویری از مقاله ترجمه و تایپ شده در نرم افزار ورد |
|
|
| دانلود رایگان مقاله انگلیسی + خرید ترجمه فارسی
|
|
| عنوان فارسی مقاله: |
کنترل حالت لغزان فازی انطباقی غیر مستقیم بر اساس مشاهده گر با فیلترهای متغیر حالت برای سیستم های دینامیکی غیر خطی ناشناخته |
| عنوان انگلیسی مقاله: |
Observer-based indirect adaptive fuzzy sliding mode control with state variable filters for unknown nonlinear dynamical systems |
|
|