گروه آموزشی ترجمه فا اقدام به ارائه ترجمه مقاله با موضوع ” موقعیت خودروهای هدایت خودکار را در طرح حلقه ” در قالب فایل ورد نموده است که شما عزیزان میتوانید پس از دانلود رایگان مقاله انگلیسی و نیز مطالعه نمونه ترجمه و سایر مشخصات، ترجمه را خریداری نمایید.
| دانلود رایگان مقاله انگلیسی + خرید ترجمه فارسی
|
|
| عنوان فارسی مقاله: |
موقعیت یابی وسایل هدایت شونده اتوماتیک در یک طرح حلقه |
| عنوان انگلیسی مقاله: |
Positioning automated guided vehicles in a loop layout |
|
|
| مشخصات مقاله انگلیسی (PDF) | |
| سال انتشار | 2000 |
| تعداد صفحات مقاله انگلیسی | 9 صفحه با فرمت pdf |
| رشته های مرتبط با این مقاله | مهندسی برق |
| گرایش های مرتبط با این مقاله | رباتیک و هوش ماشین |
| مجله | مجله اروپایی تحقیقات عملیاتی – European Journal of Operational Research |
| دانشگاه | مرکز تولید، تدارکات و مدیریت عملیات، دانشگاه Twente، هلند |
| کلمات کلیدی | موقعیت، حمل و نقل، وسایل هدایت شونده اتوماتیک، طرح حلقه، برنامه نویسی پویا |
| رفرنس | دارد |
| لینک مقاله در سایت مرجع | لینک این مقاله در نشریه Elsevier |
| نشریه | Elsevier |
| مشخصات و وضعیت ترجمه فارسی این مقاله (Word) | |
| تعداد صفحات ترجمه تایپ شده با فرمت ورد با قابلیت ویرایش و فونت 14 B Nazanin | 17 صفحه |
| ترجمه عناوین جداول | ترجمه شده است |
| ترجمه متون داخل جداول | ترجمه تشده است |
| درج تصاویر در فایل ترجمه | ندارد |
| درج جداول در فایل ترجمه | درج شده است |
| درج فرمولها و محاسبات در فایل ترجمه به صورت عکس | درج شده است |
- فهرست مطالب:
چکیده
1. مقدمه
2. بیان مسئله، نمادها و فرضیات
3. سیستم جریان یک سویه
3.1. مقدمات
3.2. به حداقل رساندن تابع منظم دلخواه
3.3. به حداقل رساندن حداکثر زمان واکنش
4. سیستم جریان دوسویه
4.1. موارد مقدماتی
4.2. یک مورد حل شدنی
4.2.1 سرعت حرکت ثابت
5. نتیجه گیری
- بخشی از ترجمه:
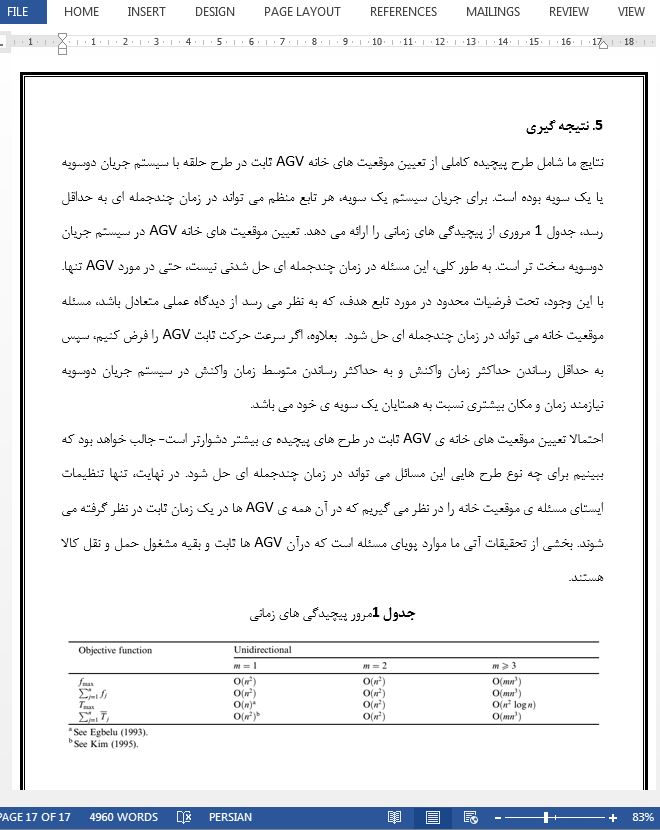
5. نتیجه گیری
نتایج ما شامل طرح پیچیده کاملی از تعیین موقعیت های خانه AGV ثابت در طرح حلقه با سیستم جریان دوسویه یا یک سویه بوده است. برای جریان سیستم یک سویه، هر تابع منظم می تواند در زمان چندجمله ای به حداقل رسد، جدول 1 مروری از پیچیدگی های زمانی را ارائه می دهد. تعیین موقعیت های خانهAGV در سیستم جریان دوسویه سخت تر است. به طور کلی، این مسئله در زمان چندجمله ای حل شدنی نیست، حتی در مورد AGV تنها. با این وجود، تحت فرضیات محدود در مورد تابع هدف، که به نظر می رسد از دیدگاه عملی متعادل باشد، مسئله موقعیت خانه می تواند در زمان چندجمله ای حل شود. بعلاوه، اگر سرعت حرکت ثابت AGV را فرض کنیم، سپس به حداقل رساندن حداکثر زمان واکنش و به حداکثر رساندن متوسط زمان واکنش در سیستم جریان دوسویه نیازمند زمان و مکان بیشتری نسبت به همتایان یک سویه ی خود می باشد.
- بخشی از مقاله انگلیسی:
5. Conclusions
Our results constitute a complete complexity mapping of determining the home locations of idle AGVs in a loop layout with either a unidirectional or a bidirectional ¯ow system. For the unidirectional ¯ow system, any regular function can be minimized in polynomial time; Table 1 gives an overview of time complexities. Determining the home locations of AGVs in a bidirectional ¯ow system is much harder. In general, this problem is not solvable in polynomial time, even in case of a single AGV. However, under a restrictive assumption on the objective function, which seems to be quite mild from a practical point of view, the home location problem can still be solved in polynomial time. Furthermore, if we assume constant traveling speed of the AGVs, then minimizing maximum response time and minimizing average response time in a bidirectional ¯ow system require as much time and space as their unidirectional counterparts.
|
تصویری از مقاله ترجمه و تایپ شده در نرم افزار ورد |
|
|
| دانلود رایگان مقاله انگلیسی + خرید ترجمه فارسی
|
|
| عنوان فارسی مقاله: |
موقعیت خودروهای هدایت خودکار را در طرح حلقه |
| عنوان انگلیسی مقاله: |
Positioning automated guided vehicles in a loop layout |
|
|