| دانلود رایگان مقاله انگلیسی + خرید ترجمه فارسی
|
|
| عنوان فارسی مقاله: |
بالا بردن دقت ردیابی مسیر برای ربات های صنعتی با کنترل تطبیقی قوی |
| عنوان انگلیسی مقاله: |
Enhancing trajectory tracking accuracy for industrial robot with robust adaptive control |
|
|
| مشخصات مقاله انگلیسی (PDF) | |
| سال انتشار | 2018 |
| تعداد صفحات مقاله انگلیسی | 6صفحه با فرمت pdf |
| رشته های مرتبط با این مقاله | مهندسی برق و مهندسی کامپیوتر |
| گرایش های مرتبط با این مقاله | هوش ماشین و رباتیک، مهندسی الکترونیک، رباتیک، مهندسی کنترل و مکاترونیک |
| مجله | ساخت رباتیک و کامپیوتر یکپارچه – Robotics and Computer–Integrated Manufacturing |
| دانشگاه | دانشکده مهندسی، دانشگاه وارویک، انگلستان |
| کلمات کلیدی | 6 روبات صنعتی DOF، فضای کاری، کنترل تطبیقی قوی، سازگاری پارامتری، خطاهای ردیابی نسبی |
| شناسه شاپا یا ISSN | ISSN 0736-5845 |
| رفرنس | دارد ✓ |
| لینک مقاله در سایت مرجع | لینک این مقاله در نشریه Elsevier |
| نشریه الزویر |  |
| مشخصات و وضعیت ترجمه فارسی این مقاله (Word) | |
| تعداد صفحات ترجمه تایپ شده با فرمت ورد با قابلیت ویرایش و فونت 14 B Nazanin | 17 صفحه |
| ترجمه عناوین تصاویر و جداول | ترجمه شده است ✓ |
| ترجمه متون داخل تصاویر | ترجمه شده است ✓ |
| ترجمه متون داخل جداول | ترجمه شده است ✓ |
| درج تصاویر در فایل ترجمه | درج شده است ✓ |
| درج جداول در فایل ترجمه | درج شده است ✓ |
| درج فرمولها و محاسبات در فایل ترجمه به صورت عکس | درج شده است ✓ |
| منابع داخل متن | به صورت عدد درج شده است✓ |
- فهرست مطالب:
چکیده
1.مقدمه
2. تحلیل دینامیکی ربات های صنعتی در فضای کاری
3. طراحی کنترل
4. تطابق های پارامتری
5. ارزیابی و بحث
(a) خطای ردیابی نسبی میانگین گرفته شده برای زوایای مفاصل ربات
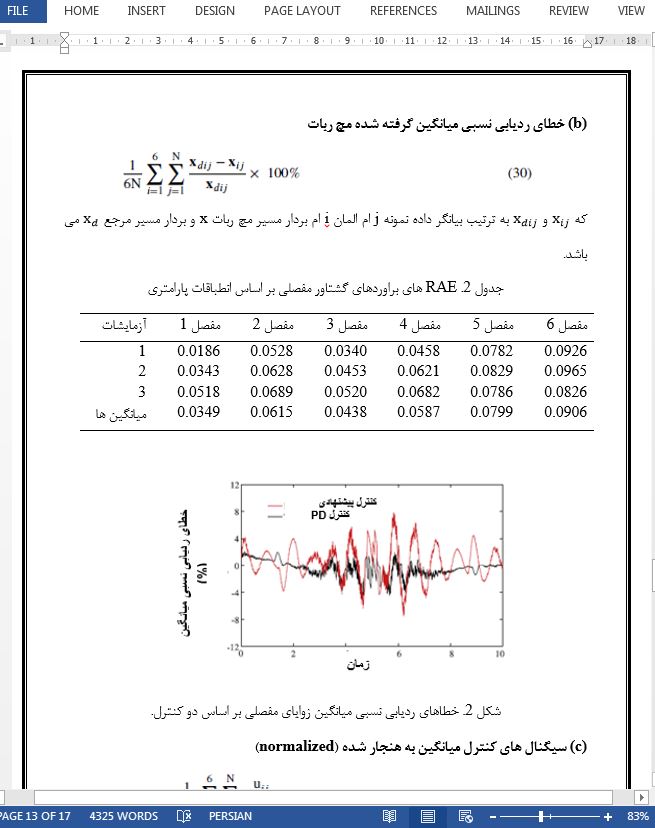
(b) خطای ردیابی نسبی میانگین گرفته شده مچ ربات
(c) سیگنال های کنترل میانگین به هنجار شده (normalized)
5. نتیجه گیری
- بخشی از ترجمه:
5. نتیجه گیری
این مقاله یک کنترل تطبیقی قوی برای کنترل ردیابی مسیر یک ربات صنعتی شش درجه آزادی در فضای کاری مچ ربات صرف نظر از تغییرات پارامتری و اختلالات عدم اطمینان ارائه داده است. علاوه بر این، قانون انطباق پارامتری آنلاین پایدار به منظور براورد پارامترهای ربات در زمان واقعی بر اساس تحریک مداوم پیشنهاد شده است. عملکردهای پایدار و ناپایدار قانون کنترل پیشنهادی توسط تابع لیاپانوف رسیدگی شده است. با ترکیب ترم های قوی و تطبیقی به منظور بالا بردن دقت ردیابی در زمانی که موانع آنها حذف می شود، کنترل تطبیقی قوی پیشنهاد شده مزایای دو کنترل قوی و تطبیقی را حفظ می کند. نتایج آزمایش نشان می دهد که کنترل پیشنهاد شده عملکرد حالت پایدار و ناپایدار تضمین شده را صرف نظر از براورد خطاها و اختلالات خارجی و خطاهای مسیر نهایی با استفاده از کنترلر ارائه شده در مقایسه با روش کنترل PD رایج به طور قابل ملاحظه ای کاهش می دهد. با پیشرفت قابل توجهی در دقت ردیابی و پایداری ربات صنعتی می توان گفت کنترلر پیشنهادی جهت استفاده گسترده در کنترل ربات های صنعتی، به خصوص در عملیات مونتاژ مستقل (autonomous assembly) جایگاه ویژه ای دارد.
- بخشی از مقاله انگلیسی:
5. Conclusion
This paper has presented the robust adaptive control for trajectory tracking control of a 6 DOF industrial robot in the task space of the endeffector regardless of parametric variations and uncertain disturbances. Furthermore, the stable online parametric adaption law has been proposed to estimate the robot parameters in real time based on persistent excitation. The transient and stable performances of the proposed control law have been verified through Lyapunov function. By combining the robust and adaptive terms to enhance the tracking accuracy, the proposed robust adaptive control preserves the advantages of both the robust and adaptive controls while eliminating their drawbacks. Test results have also been obtained to show that the proposed control achieves the guaranteed transient and steady-state performance regardless of the estimation errors and external disturbances and the final trajectory errors can be significantly reduced by using the proposed controller as compared to the conventional PD control method. With the significant improvements in the tracking accuracy and stability of the industrial robot, the proposed controller is well positioned to be widely used in the control of industrial robots, especially in the autonomous assembly operations.
|
تصویری از مقاله ترجمه و تایپ شده در نرم افزار ورد |
|
|
| دانلود رایگان مقاله انگلیسی + خرید ترجمه فارسی
|
|
| عنوان فارسی مقاله: |
بالا بردن دقت ردیابی مسیر برای ربات های صنعتی با کنترل تطبیقی قوی |
| عنوان انگلیسی مقاله: |
Enhancing trajectory tracking accuracy for industrial robot with robust adaptive control |
|
|